


Antrinės misijos įgyvendinimas🛰️
5/19/20263 min skaitymo
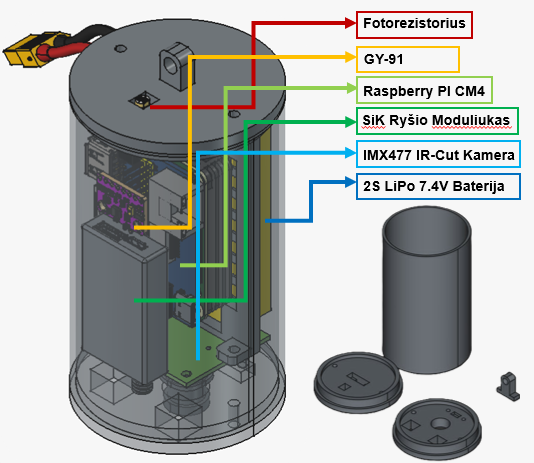
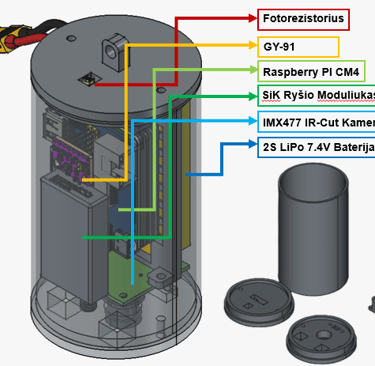
Antrinei misijai įgyvendinti į „CanSat“ palydovą integravome kamerą, jutiklius, skaičiavimo modulį, ryšio modulį ir maitinimo sistemą. Šie komponentai leidžia palydovui skrydžio metu rinkti duomenis, fotografuoti aplinką, apdoroti vaizdus ir perduoti svarbiausią informaciją į Žemės stotį.
Pagrindinis sistemos valdiklis yra Raspberry Pi CM4, kuris apdoroja jutiklių duomenis ir vykdo dirbtinio intelekto modelį. IMX477 IR-Cut kamera naudojama vaizdams fiksuoti, o GY-91 jutiklis renka informaciją apie palydovo judėjimą, orientaciją ir slėgį. Fotorezistorius padeda stebėti apšvietimo pokyčius, SiK ryšio modulis perduoda duomenis į Žemės stotį, o 2S LiPo 7,4 V baterija maitina visą sistemą. Tokia komponentų struktūra leidžia palydovui veikti autonomiškai ir atlikti antrinę misiją skrydžio metu.
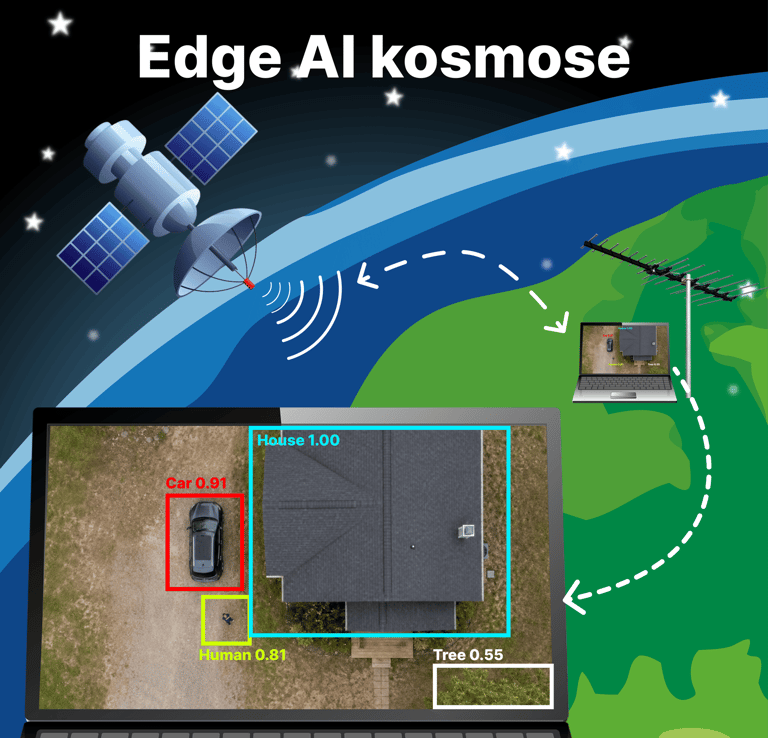
Mūsų antrinė misija – sukurti autonominę vaizdo analizės sistemą, integruotą į „CanSat“ palydovą. Šios misijos metu palydovas turi ne tik rinkti įprastus skrydžio duomenis, bet ir fotografuoti aplinką, apdoroti gautus vaizdus bei atpažinti pasirinktus objektus. Pagrindinė idėja – perduoti į Žemės stotį ne visą vaizdinę informaciją, o tik svarbiausius rezultatus: aptiktų objektų duomenis, jų atpažinimo tikslumą ir atrinktus vaizdus.
Šioje misijoje naudojame Edge AI principą. Tai reiškia, kad dirbtinio intelekto modelis veikia pačiame palydove, o ne nutolusiame serveryje. Kamera užfiksuoja vaizdą, Raspberry Pi CM4 jį apdoroja, o DI modelis atpažįsta objektus ir atrenka tik reikšmingą informaciją. Toks sprendimas leidžia sumažinti perduodamų duomenų kiekį, taupyti energiją ir efektyviau naudoti ribotą radijo ryšio kanalą.
Finalo metu „CanSat“ palydovas rinko aplinkos ir judėjimo duomenis, kurie padėjo įvertinti sistemos veikimą realiomis skrydžio sąlygomis. Buvo fiksuojama temperatūra, palydovo pagreitis ir sukimosi greitis. Šie duomenys parodė, kaip palydovas elgėsi skrydžio metu, ar sistema veikė stabiliai ir ar visi pagrindiniai komponentai tinkamai atliko savo funkcijas. Surinkti rezultatai taip pat svarbūs antrinei misijai, nes autonominė vaizdo analizės sistema turi veikti kartu su jutikliais, kamera, maitinimo sistema ir duomenų perdavimo moduliu. Finalo duomenys leidžia įvertinti, ar mūsų pasirinktas sprendimas yra tinkamas mažos galios autonominei sistemai.
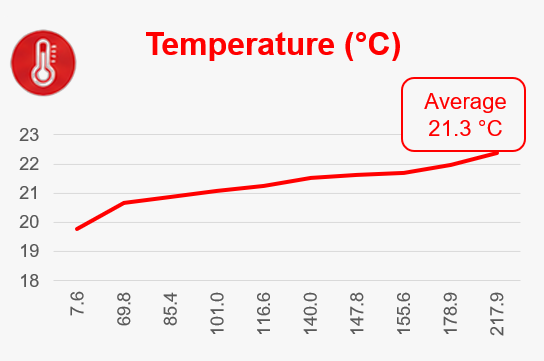
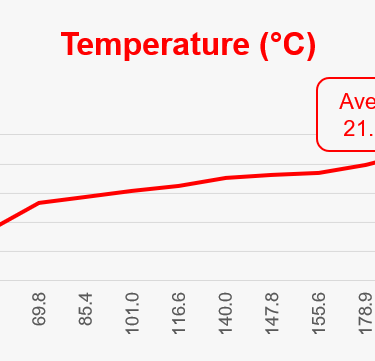

Grafike pavaizduotas temperatūros pokytis skrydžio metu. Vidutinė užfiksuota temperatūra – 21,3 °C.
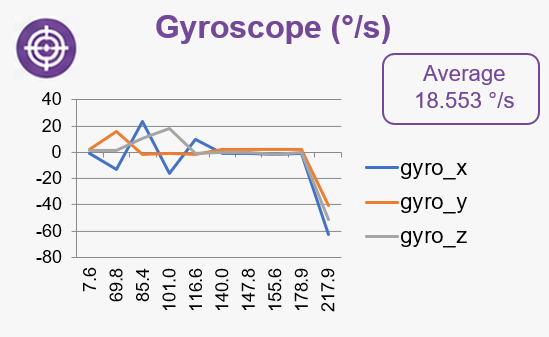
Grafike pavaizduotas palydovo sukimosi greičio pokytis pagal X, Y ir Z ašis skrydžio metu. Vidutinis užfiksuotas kampinis greitis – 18,553 °/s.
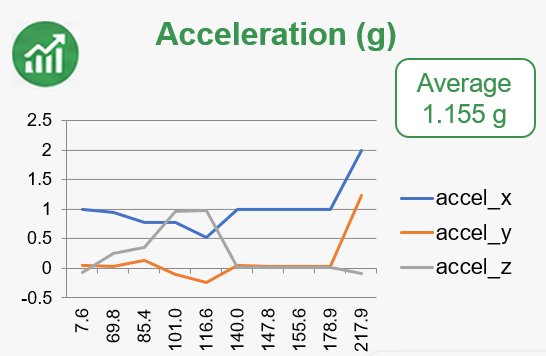
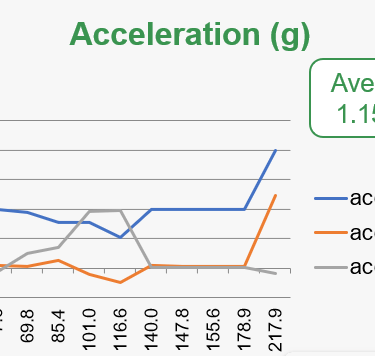
Grafike pavaizduotas palydovo pagreičio pokytis pagal X, Y ir Z ašis skrydžio metu. Vidutinis užfiksuotas pagreitis – 1,155 g.
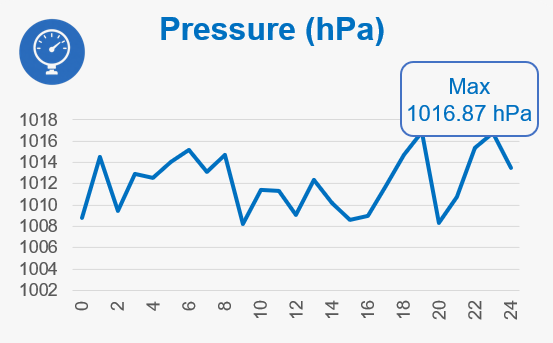
Grafike pavaizduotas atmosferos slėgio pokytis skrydžio metu. Didžiausias užfiksuotas slėgis – 1016,87 hPa.
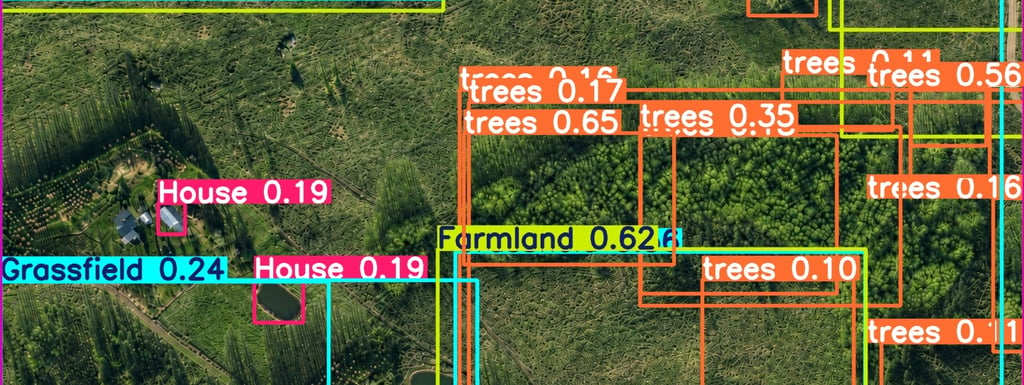
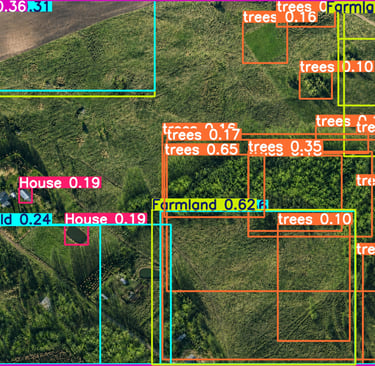
Nuotraukoje pavaizduotas DI modelio apdorotas vaizdas iš skrydžio metu užfiksuotos aplinkos. Sistema atpažino skirtingus objektus ir teritorijas, pažymėjo juos rėmeliais bei pateikė aptikimo tikslumo reikšmes. Pavyzdyje matomi atpažinti medžiai, pastatai, pieva ir dirbamos žemės plotai.
Susisiekite su mumis
El. paštas
info@oscaras.lt
© 2026. Visos autorinės teisės yra saugomos.
Adresas
Vilniaus r. Avižienių gimnazija
Sudervės g. 8, Avižienių k., LT-14192, Vilniaus r.
Adresas
Vilniaus r. Nemenčinės Gedimino gimnazija
Ežero g. 14, Nemenčinė, LT-15170, Vilniaus r.